Library
Search the public knowledge base.
Curated paths
Transformer Foundations
KV Caching in Autoregressive Transformers
1 article>Generative Models
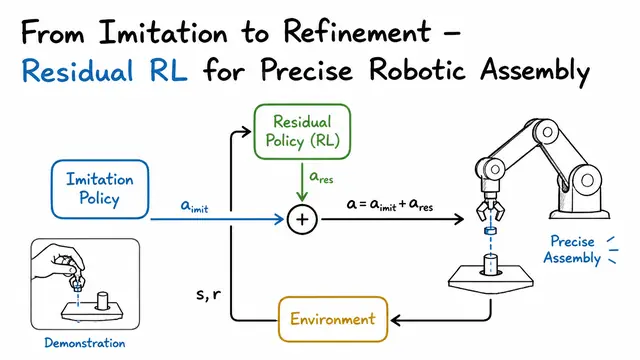
From Imitation to Refinement – Residual RL for Precise Robotic Assembly
1 article>Reinforcement Learning Path
From Imitation to Refinement – Residual RL for Precise Robotic Assembly
1 article>Math for Deep Learning
LoRA Fine-Tuning: Low-Rank Adaptation of Large Neural Networks
1 article>Collection - 1 results