Library
Search the public knowledge base.
Curated paths
Transformer Foundations
From attention mechanics to modern architectures.
0 articles>Generative Models
From Imitation to Refinement – Residual RL for Precise Robotic Assembly
1 article>Reinforcement Learning Path
From Imitation to Refinement – Residual RL for Precise Robotic Assembly
1 article>Math for Deep Learning
Imitation Bootstrapped Reinforcement Learning (IBRL): Using Demonstrations in Exploration and Bootstrapping
1 article>10 results
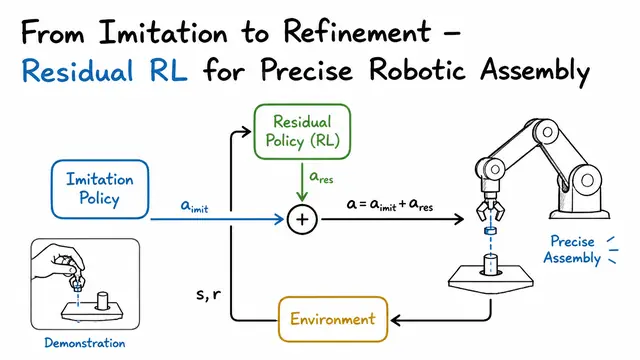
From Imitation to Refinement – Residual RL for Precise Robotic Assembly
A diagram-rich generated explanation from the public library.
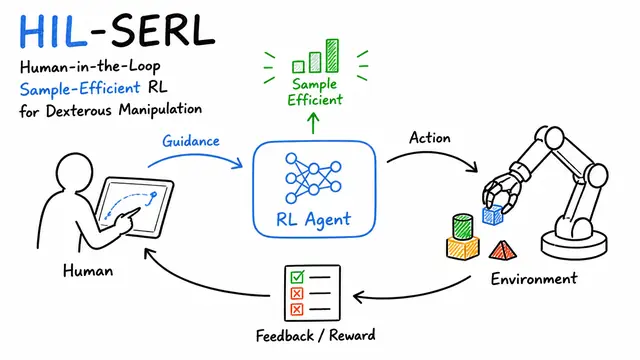
HIL-SERL: Human-in-the-Loop Sample-Efficient Robotic Reinforcement Learning for Dexterous Manipulation
A diagram-rich generated explanation from the public library.
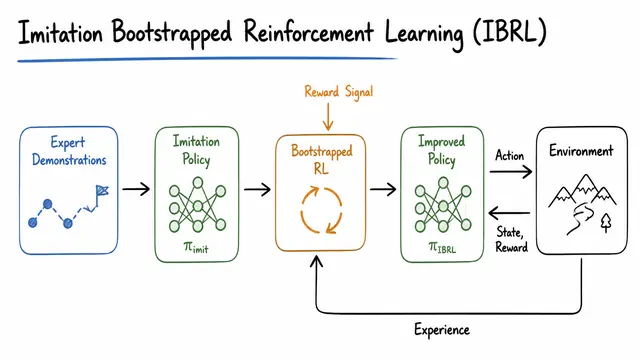
Imitation Bootstrapped Reinforcement Learning (IBRL)
A diagram-rich generated explanation from the public library.
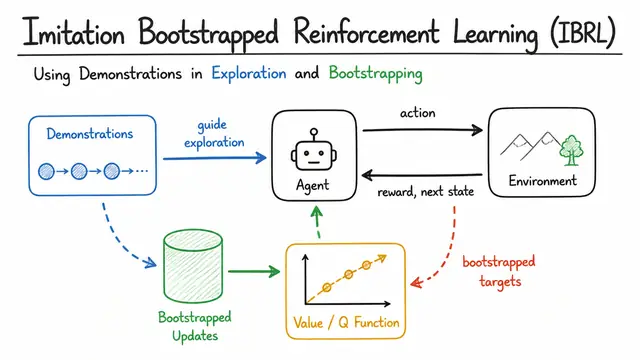
Imitation Bootstrapped Reinforcement Learning (IBRL): Using Demonstrations in Exploration and Bootstrapping
A diagram-rich generated explanation from the public library.
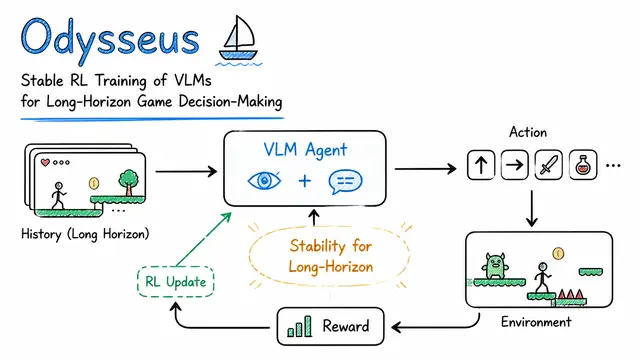
Odysseus: Stable RL Training of VLMs for Long-Horizon Game Decision-Making
A diagram-rich generated explanation from the public library.
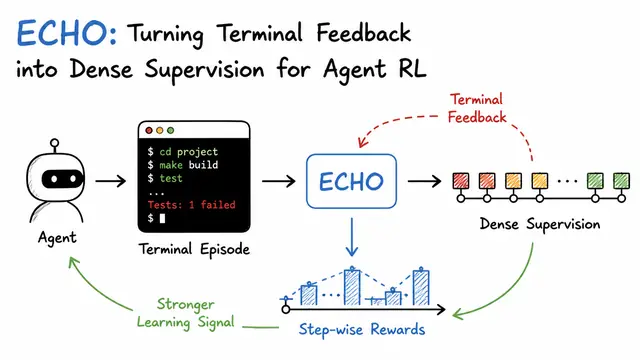
ECHO: Turning Terminal Feedback into Dense Supervision for Agent RL
A diagram-rich generated explanation from the public library.
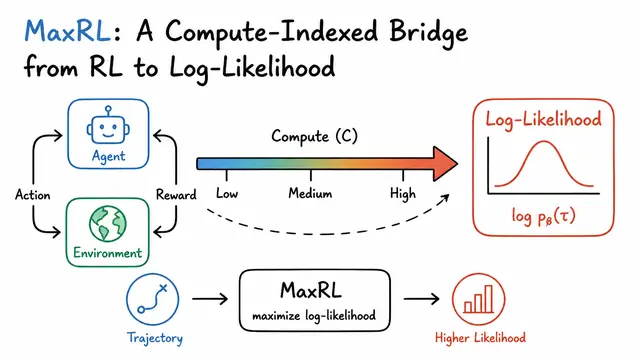
Maximum Likelihood Reinforcement Learning (MaxRL): A Compute-Indexed Bridge from RL to Log-Likelihood
RL framework that approximates maximum likelihood for binary-outcome tasks.
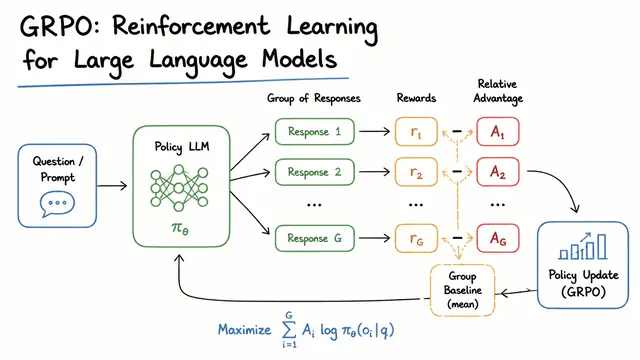
Reinforcement Learning for Large Language Models: Group Relative Policy Optimization (GRPO)
GRPO and RL for LLM's
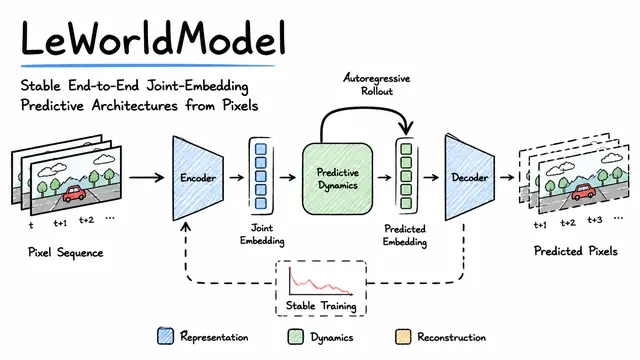
LeWorldModel: Stable End-to-End Joint-Embedding Predictive Architectures from Pixels
Stable JEPA-based world model that learns and plans from raw pixels.
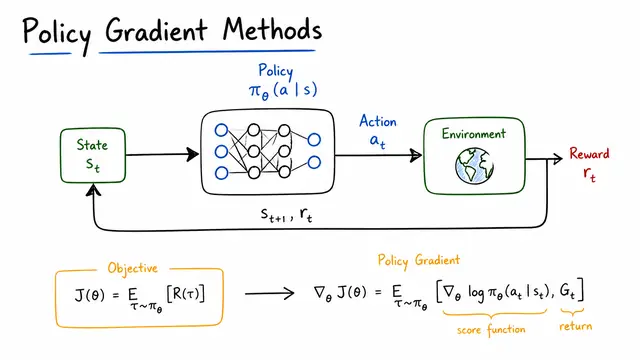
Policy Gradient Methods
policy gradient methods